
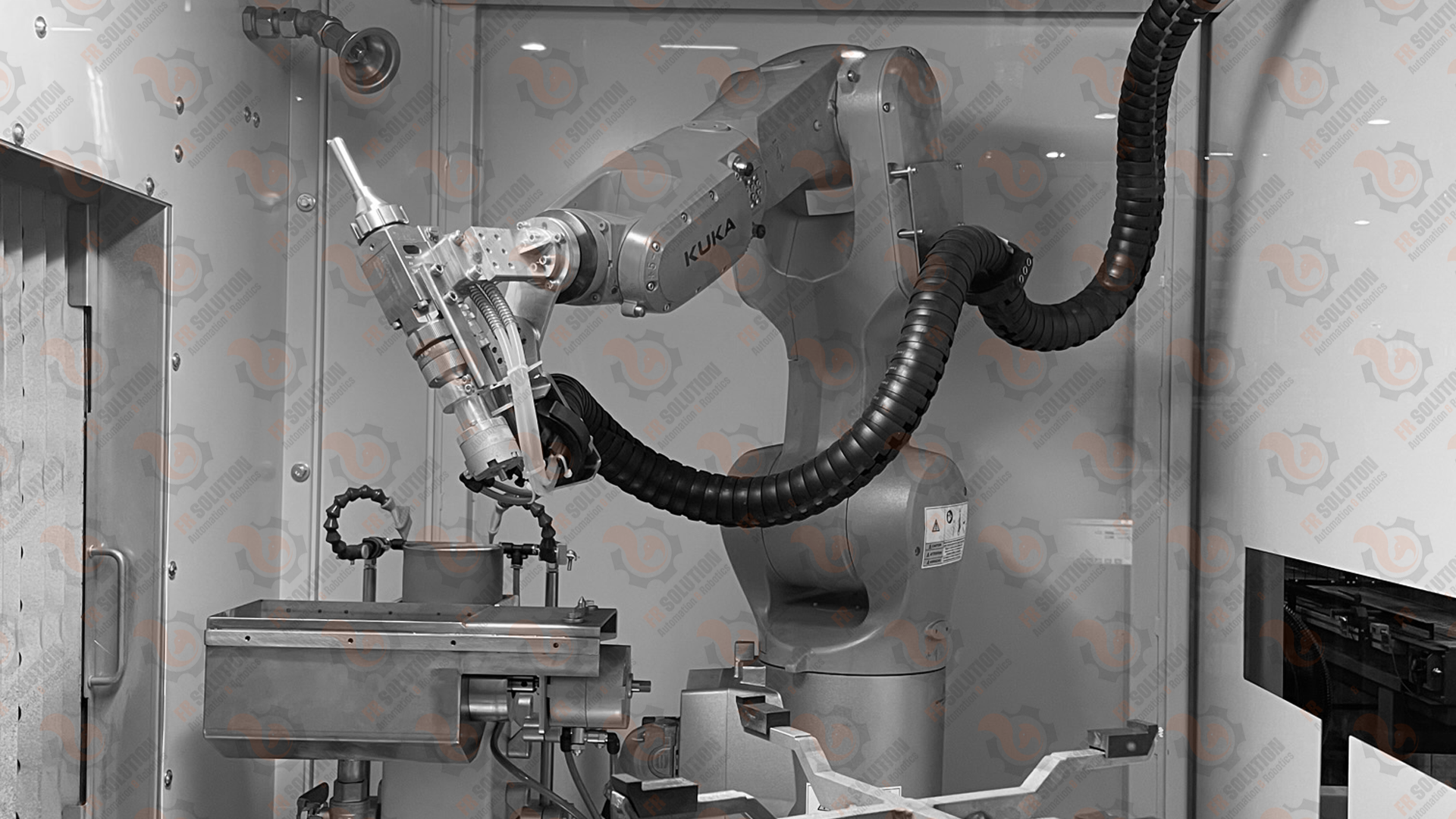



ROBOT DI VERNICIATURA IL ROBOT VERNICIA IL COMPONENTE IN BASE ALLE DIMENSIONI DI ESSO, ADATTANDOSI AUTOMATICAMENTE AD ESSO.

SISTEMA DI VISIONE 3D KEYENCE
PRELIVO CON SISTEMA DI VISIONE 3D DA CASSONE PRELIEVO TRAMITE SISTEMA DI ANALISI LASER CON LUCE STRUTTURATA PER COSTRUZIONE DELLA NNUVOLA DI PUNTI 3D, MANIPOLAZIONE DEL COMPONENTE CON PALLETTIZZAZIONE FINALE, ISOLA CON DOPPIO ROBOT

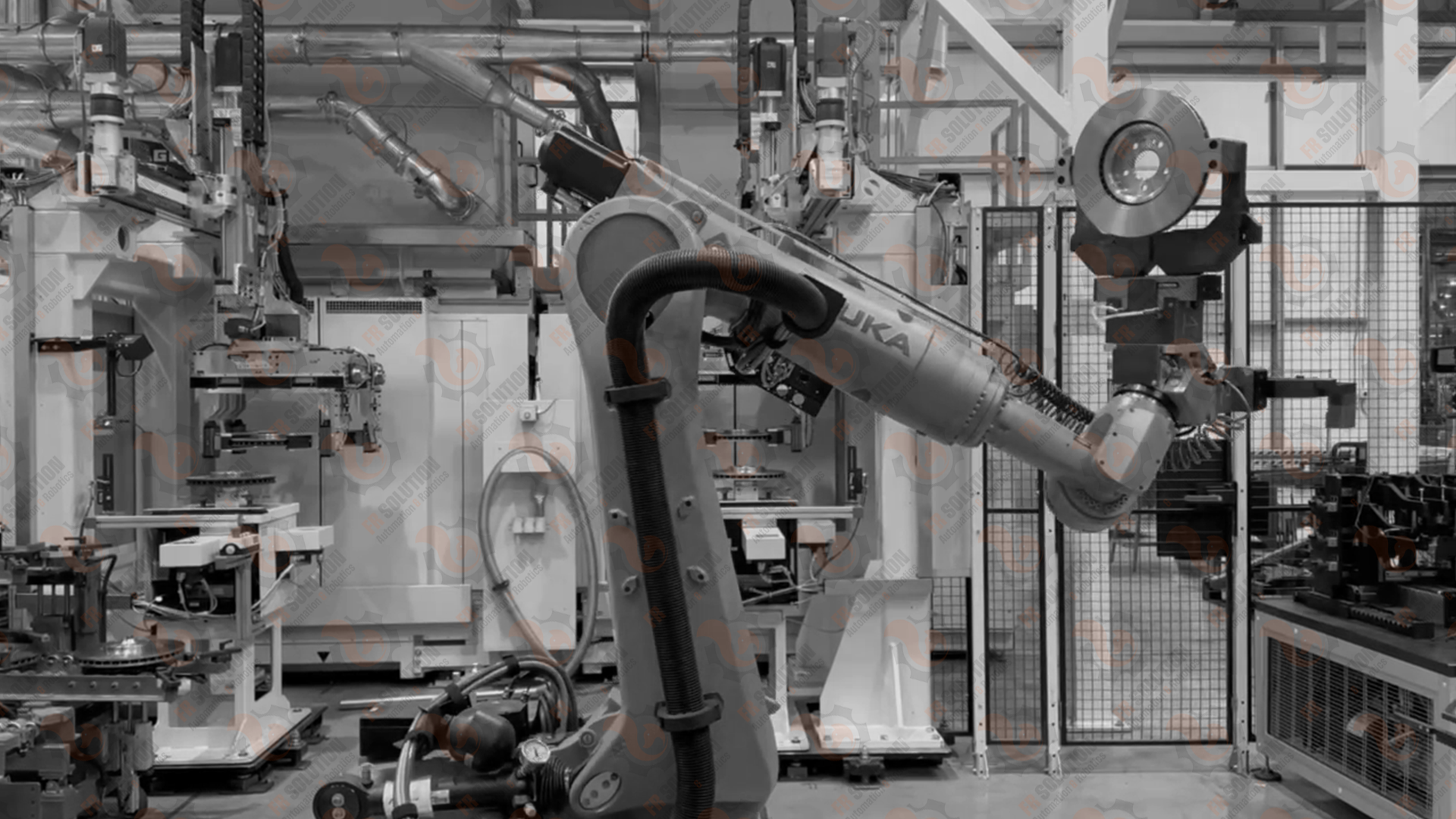
MANIPOLAZIONE ALTA VELOCITA’
ROBOT DI PICCOLA TAGLIA AD ALTA VELOCITA’ INTEGRAZIONE ROBOT IN SISTEMA DI PRODUZIONE COMPONENTI AD ALTA VELOCITA’

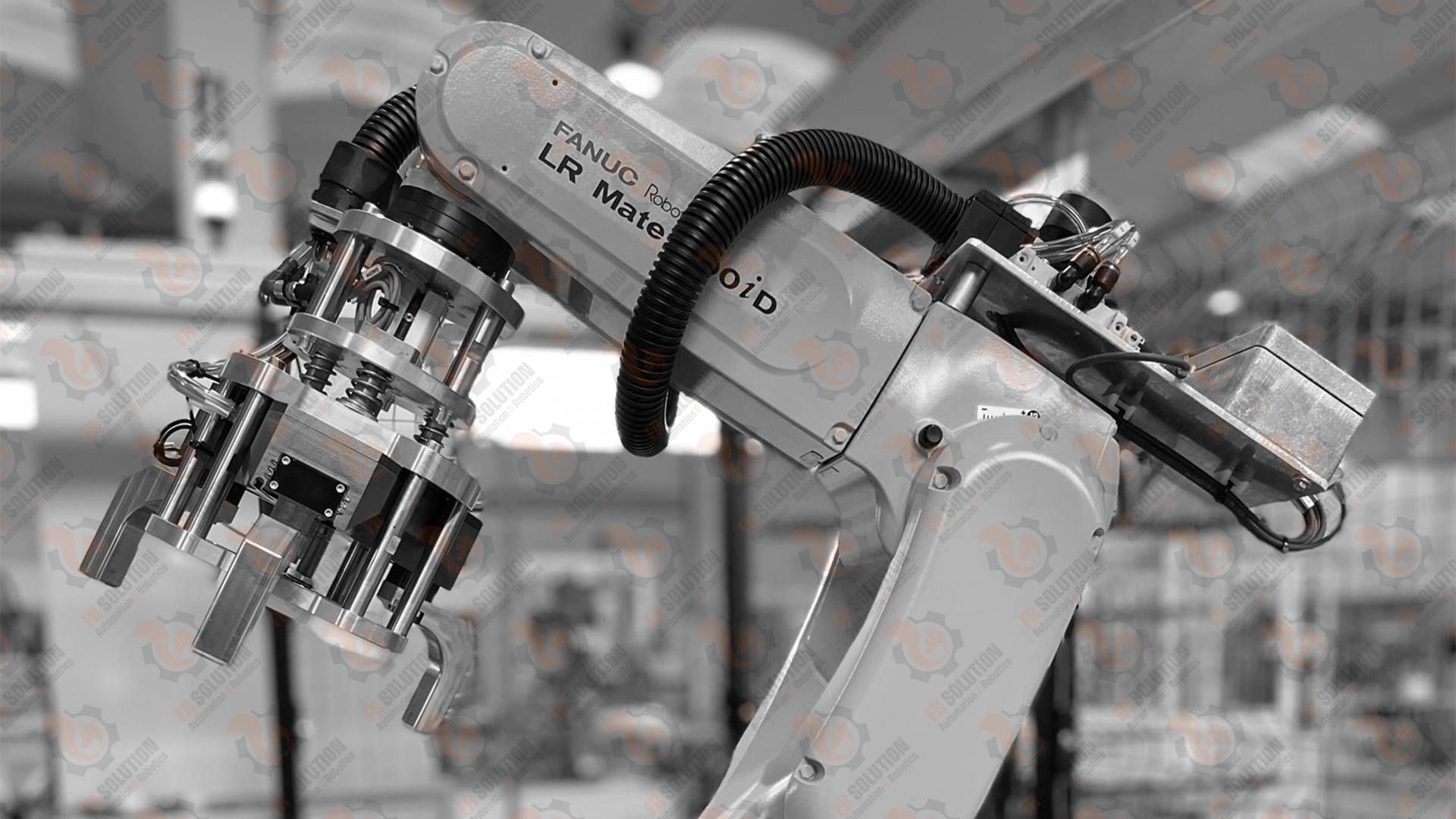
COLLABORATIVO
PRELIEVO E DEPOSITO DA PALLET PER ASSERVIMENTO MACCHINA L’ASSERVIMENTO MACCHINA VIENE FATTO CON UN ROBOT COLLAORATIVO IN SOSTITUZIONE ALL’UOMO, IL ROBOT GRAZIE ALLA SUA PRECISIONE GARANTISCE RIPETITIBILITA’ E CADENZA A DIFFERENZA DELL’UOMO.

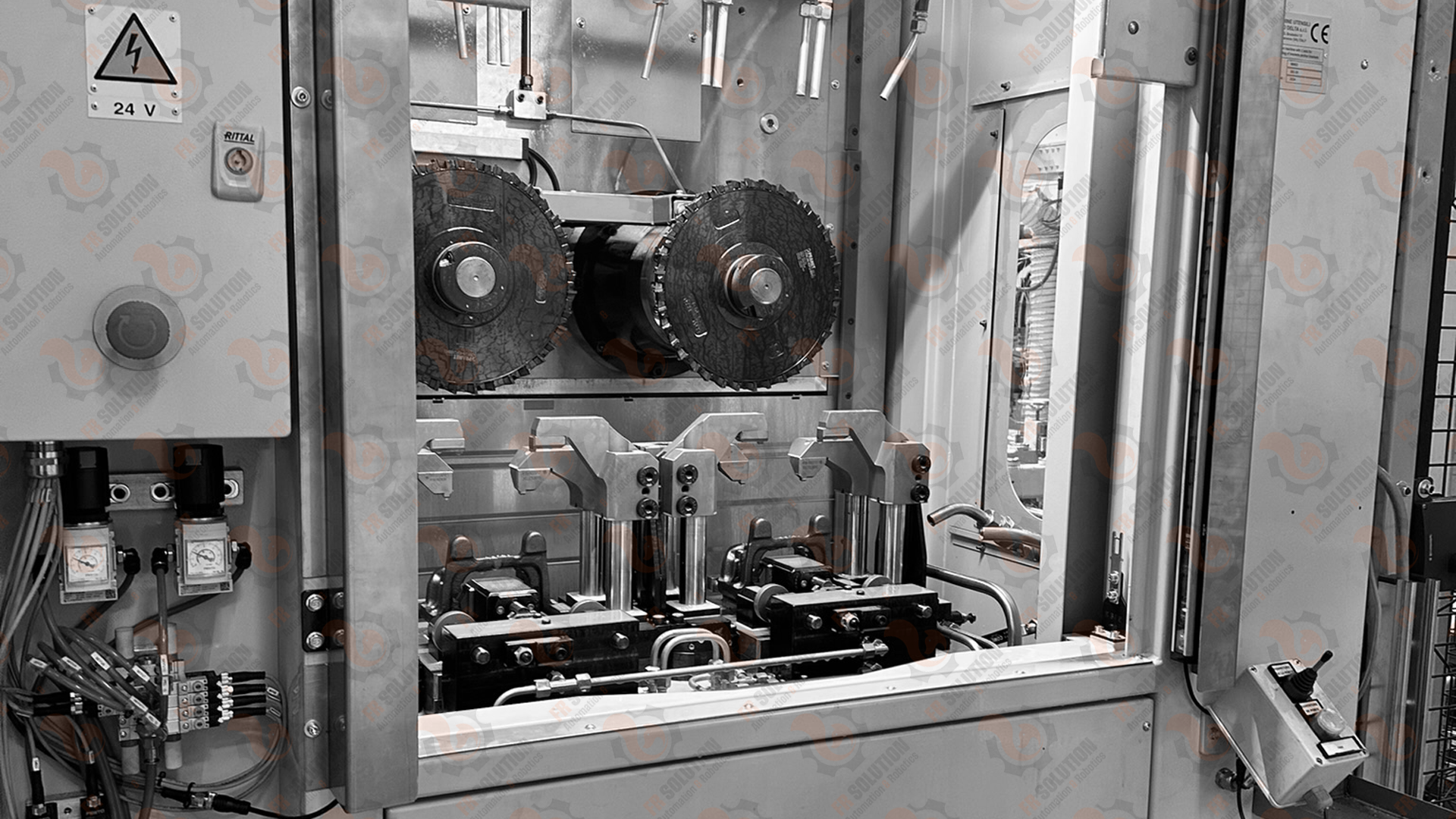
PALLETTIZZAZIONE
SCARICO MACCHINA E PALLETTIZZAZIONE IL ROBOTO EFFETTUA LO SCARICO DALLA MACCHINA DI PRODUZIONE E PALLETTIZZA IN DIVERSI SCHEMI ADATTANDOSI ALLE DIMENSIONI DEL PRODOTTO

CAMBIO PINZA
CAMBIO PINZA ROBOT PALLETTIZZATORE SISTEMA DI CAMBIO PINZA AUTOMATIZZATO, GRIPPER SCELTO IN BASE AL PESO DEL PRODOTTO, IN MODO DA EFFETTUARE LA MOVIMENTAZIONE DEL PEZZO NEL MIGLIORE DEI MODI

MANIPOLAZIONE DOPPIA PINZA
MANIPOLAZIONE PEZZI CON GRIPPER DOPPIO IL DOPPIO GRIPPER PERMETTE DI EFFETTUARE IL CARICO E SCARICO DEL DOPPIO DEI PEZZI RADDOPPIANDO IL TEMPO CICLO DEL ROBOT